
Sim-to-Real: Designing Locomotion Controller for Six-Legged Robot
Published in ieee-cyber, 2019
This is my first paper(my first shot in reinforcement learnning, and in writting papers), originally from a course project for introduction of reinforcement learning.
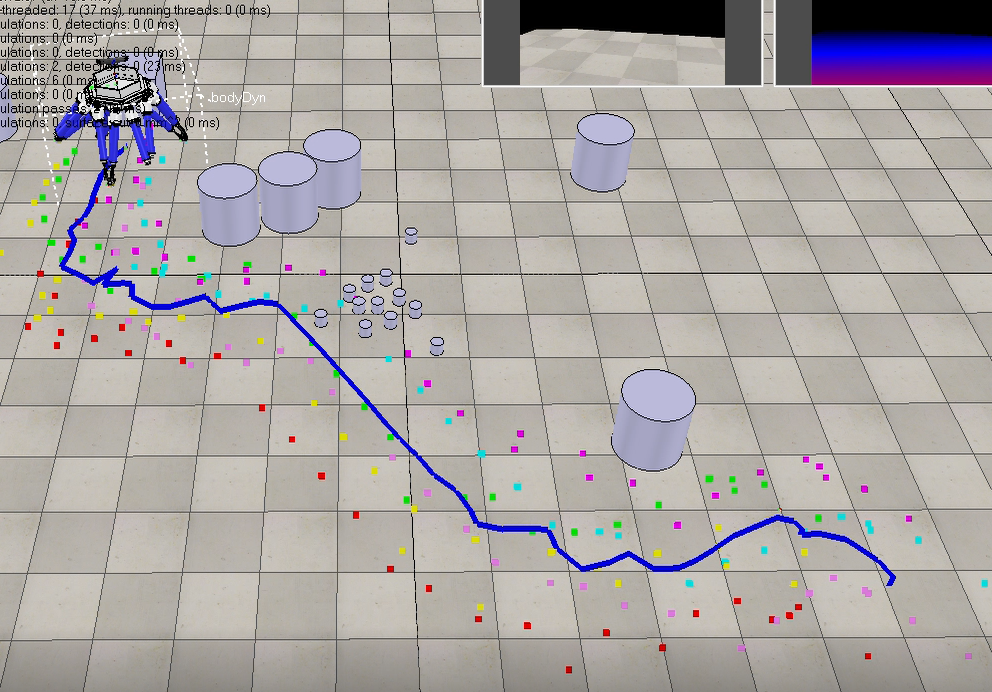
The goal is to train a hexpod learn to walk.
locomotion control for robot to walk
higher level control for robot to naviate